
바퀴벌레를 모방한 로봇 공학 연구 임무 완수의 새로운 문을 열다
2021-05-22
바퀴벌레를 모방한 로봇 공학 연구, 임무 완수의 새로운 문을 열다.
미국 캘리포니아 버클리 대학(이하 UC 버클리)연구진은 미국 육군 연구소(U.S. Army Research Laboratory, 이하 ARL)의 지원을 받아, 바퀴벌레가 아주 좁은 공간을 비집고 통과하는 능력을 모방하여 바닥을 기어 다니는 작은 로봇을 개발하였다. UC 버클리 연구원 Kaushik Jayaram 박사와 Robert Full 박사의 보고서는 미국 국립과학아카데미 회보(Proceedings of the National Academy of Sciences) 최신판에 게재된 바 있다.
그들은 바퀴벌레의 외골격으로부터 영감을 받아 여러 개의 판을 겹친 종이 접기 식으로 되어있으며 부드러운 재질로 양쪽 다리를 연결한 로봇을 제작하였다. 이 로봇은 자연 재해나 폭발에 의해 잔해와 파편이 쌓여 있어 응급 상황에 긴급 구조원이 접근하지 못하는 지역을 포함하여 넓은 공간과 좁은 공간 모두에서 재빠르게 움직일 수 있다. 손바닥 크기의 이 로봇들은 크램(CRAM, Compressible Robot with Articulated Mechanisms, 압축 가능한 다관절 기계 장치 로봇)이라고 알려져 있다. 연구진은 이와 같이 곤충에게 영감을 받은 기술에서 큰 가능성을 발견했는데, 더욱 탄탄한 기술력을 갖춘 버전이 개발된다면 실제로 재앙이 닥쳤을 때 이러한 기술의 가능성이 검증될 것이다.
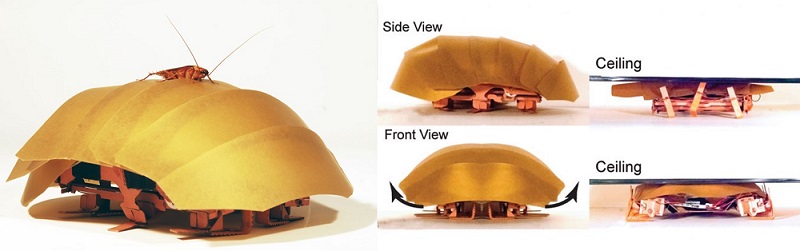
▲ 크램(CRAM)은 바퀴벌레의 외골격을 모방하여 여러 개의 판을 겹쳐 만들어져 압력을 견딜 수 있다.
일반적으로 MAST로 알려진 ARL의 마이크로 자율 시스템 및 기술(Micro Autonomous Systems and Technology, MAST)과 공동 기술 협회(Collaborative Technology Alliance, CTA)가 이 프로젝트를 지원한다. 군사계, 산업계, 그리고 학계가 하나의 그룹을 형성한 것이다.
MAST CTA의 협력 협정 관리자 Brett Piekarski 박사는 “이 기술의 목적은, 초소형 항공 및 지상 자율 시스템이 자율성과 기동성을 발휘하고 공동 작업을 가능하게 함으로써, 실제 환경의 복합적인 요인으로 인해 군사력이 떨어진 상황을 더욱 민첩하게 인지할 수 있도록 기반 과학을 개발하고 탐구하는 데에 있습니다.”라고 밝혔다.
Piekarski 박사는 “UC 버클리 연구소는 미래형 군사 자율 로봇 공학 시스템에 응용될 수 있는 생체 모방 기술의 기동성 및 통제 방법을 연구하고 있습니다.”라고 말하며, “프로그램 전체를 통틀어서, 연구원들은 ‘다양한 형태의 표면 위에서 곤충들은 어떻게 자유자재로 옮겨 다니는가’에서부터 시작하여 ‘기복이 심한 지형에서 안정성을 유지하고 또는 빠르게 움직이기 위해 도마뱀들은 그들의 꼬리를 어떻게 쓰는가’, ‘ARL과 협력 프로젝트로 이어진 생태 모방 자체 복원 기술’, 그리고 ‘바퀴벌레들은 매우 좁은 틈을 어떻게 자유자재로 지나다니는가’에 이르기까지 다양한 영역에 초점을 맞춰 연구를 진행해왔습니다.”라고 밝혔다. Piekarski 박사는 이어서, “이러한 연구들은 미래의 초소형 자율화 시스템이 운영되는 방식을 혁신적으로 바꾸어 새로운 발견을 이끌어낼 수 있을 것이고, 복잡한 3D 지형도 자유자재로 누비게 될 것입니다.”라고 말했다.
한편, Chad Kessens를 비롯한 ARL 연구진은 UC 버클리와 함께 바퀴벌레 모방 로봇의 자체 복원 능력에 대한 공동 연구를 진행하고 있다.
로봇 조작 연구 엔지니어인 Kessens는 쓰러진 후에 다시 스스로 일어나서 발/바퀴/트랙 등으로 일어설 수 있는 자체 복원 능력을 결정하는 분석적 틀을 개발하고 있다. 이것은 특정 로봇이 자체 복원을 위해 내재된 부속물 혹은 로봇이 움직일 때 이용하는 다른 수단 등을 어떻게 운용하는지를 분석하기 위해 설계되었다. 로봇의 외형이 어떠하든 이러한 분석적 틀을 미래형 시스템만큼 우수하게 기존의 필드 시스템에 적용하는 데에 그 목적이 있다.
“우리가 ARL에서 개발해왔던 소프트웨어는, 특정 로봇이 쓰러진 후에 다시 원래의 상태로 돌아가는 능력을 분석하고 평가합니다.” 라고 Kessens는 말했다. “UC 버클리 그룹과 나는 다양한 종류의 바퀴벌레의 날개 기하학과 그들이 자체 복원을 위해 선택하는 방안들이 어떠한 관계가 있는지를 이해하기 위해 이 소프트웨어를 사용합니다. 우리는 그들이 개발한 ‘자체 복원 능력을 지닌 바퀴벌레 모방 로봇’을 통해 이 소프트웨어를 검증해왔습니다.”

Kessens는 “바퀴벌레의 자체 복원 전략이 로봇 공학 운용에 제공하는 기계적, 에너지 효율적 이점이 무엇인지 그들이 더욱 깊이 이해할 수 있게 되기를 바랍니다. 바퀴벌레를 모방한 자체 복원 능력을 지니고 있는 로봇은 전장(戰場)에서 매우 귀중한 자산이 될 것입니다. 군인들은 기존 로봇 시스템이 전복(顚覆)되는 상황을 중대한 문제로서 보고해왔습니다. 지형이 매우 울퉁불퉁한 지역과 전장에서 겪을 수 있는 다양한 상황들은 로봇이 위아래로 뒤집힐 수 있는 위험을 초래하고, 이는 미션 완수의 지연, 나아가 군사 임무 수행을 위해 반드시 필요한 로봇 장치 손실의 위험을 초래할 수 있습니다.” 라고 말하며, 임무 수행의 몇 가지 측면에서 이러한 문제는 사실상 불가피한 것은 사실이지만 로봇이 한번 전복되면 로봇 엔지니어가 로봇을 어떻게 복구할지를 결정하는 것이 매우 어렵다는 사실에 주목했다. (로봇이 전복되면) 엔지니어는 종종 그 로봇을 직접 볼 수 없을뿐더러, 로봇에 장착된 카메라 역시 하늘이나 바닥만을 향하고 있게 되기 때문에 전복된 로봇이 어디에 위치해있는지 알아내는 것이 더 어렵게 된다고 하였다.
“나와 이야기를 나누었던 한 병사는, 그의 로봇을 너무나도 아낀 나머지 전복된 로봇을 되돌리기 위해 수많은 시도를 했으나 결국 모든 것이 수포로 돌아가자 차량 안전 규정마저 무시하고 로봇을 구하려고 했습니다. 이것이 바로 우리가 원치 않는 부분입니다. 병사 역시 로봇을 구하기 위해 그들 자신을 위험으로 내몰아서는 안되죠.” Kessens는 말했다.
몇몇 사람들은 이것을 단순히 성가신 골칫거리로 볼 수 있겠지만, 로봇 연구진은 바퀴벌레 및 이와 비슷한 곤충들을 모방하여 만들어낸 기술로써 민간 혹은 군사적 위기의 상황에서 생명을 구할 수 있는 가능성을 열기 위해 각고의 노력을 다하고 있다.
번역 : 하지윤 연구원
편집 : 김수진 선임연구원
 로그인
로그인 회원가입
회원가입